What is Shi-Tomasi corner detection?
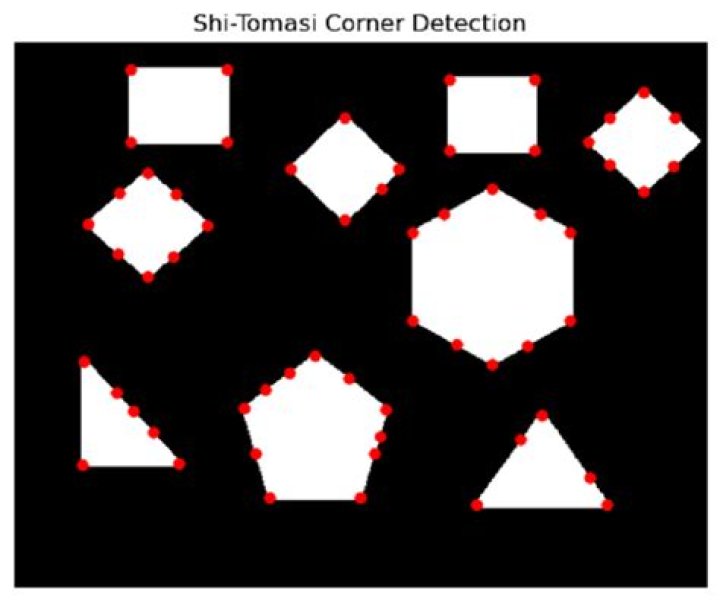
What is Shi-Tomasi corner detection?
It finds N strongest corners in the image by Shi-Tomasi method (or Harris Corner Detection, if you specify it). As usual, image should be a grayscale image. With all these informations, the function finds corners in the image. All corners below quality level are rejected.
What is the significance of the Hessian matrix in Harris Corner Detection?
Furthermore, it was shown that all these differential scale-space interest point detectors defined from the Hessian matrix allow for the detection of a larger number of interest points and better matching performance compared to the Harris and Shi-and-Tomasi operators defined from the structure tensor (second-moment …
Why is Corner detected in image processing?
Corner detection works on the principle that if you place a small window over an image, if that window is placed on a corner then if it is moved in any direction there will be a large change in intensity.
Is the Harris corner detector scale and translation invariant?
Corners are the important features in the image, and they are generally termed as interest points which are invariant to translation, rotation and illumination.
How does Harris corner detection work?
Compared to the previous one, Harris’ corner detector takes the differential of the corner score into account with reference to direction directly, instead of using shifting patches for every 45-degree angles, and has been proved to be more accurate in distinguishing between edges and corners.
What is Hessian corner detection algorithm used for?
The Hessian affine region detector is a feature detector used in the fields of computer vision and image analysis. Like other feature detectors, the Hessian affine detector is typically used as a preprocessing step to algorithms that rely on identifiable, characteristic interest points.
How does Harris corner detector work?
What is r in Harris corner detection?
When |R| is small, which happens when λ1 and λ2 are small, the region is flat. When R<0, which happens when λ1>>λ2 or vice versa, the region is an edge. When R is large, which happens when λ1 and λ2 are large and λ1∼λ2, the region is a corner.
What is K in Harris corner detector?
The idea is that a pixel is defined as a corner only if it has big gradients in 2 perpendicular directions, which means the M matrix has 2 big eigenvalues (1 big eigenvalue will simply be an edge). Here we can see Harris detector’s free parameter – k. It is an empirically determined constant in the range [0.04,0.06]:
How do you implement Harris corner detection?
Implementing a Harris corner detector
- Compute image intensity gradients in x- and y-direction.
- Blur output of (1)
- Compute Harris response over output of (2)
- Suppress non-maximas in output of (3) in a 3×3-neighborhood and threshold output.
How is fast detector different from Harris corner detector?
FAST detector has better than Shi-Tomasi & Harris in detecting precise and actual corners-points . Shi-Tomasi corner detection is more stronger to noise than FAST & Harris. in each type of noise (Gaussian, salt&pepper and speckle ) one of the aforementioned algorithms was the best than other .