How do I program my NXT light sensor?
To use the method built into the NXT software, connect your NXT to your PC (with the NXT cable or Bluetooth), then select the Tools -> Calibrate Sensors menu item, choose Light Sensor, and choose the correct sensor port (port 3 is used by these line following programs) and press the Calibrate button.
How does the NXT light sensor work?
How does the LEGO NXT light sensor work? The light sensor detects the brightness of light it receives and converts it to a numerical value as a percentage (%) of the maximum brightness it can detect.
How do you make a Lego robot follow a black line?
LINE FOLLOWING IN LOOP
- Start the program.
- Start motors B and C (drive forward with a curve toward the line).
- Wait for the Color Sensor to detect the color black.
- Start motors B and C (drive forward with a curve away from the line).
- Wait for the Color Sensor to detect the color white.
- Repeat steps 2 to 5 forever.
What part of the NXT controller is used to connect the sensors?
To connect a Sensor to the NXT, plug one end of a black wire into the Sensor. Plug the other end into one of the input ports (1, 2, 3, 4). The USB port and wireless Bluetooth connection are used for downloading and uploading data between your computer and the NXT.
How can we use NXT sensors with EV3 Brick?
EV3 sensors CANNOT be used with the NXT brick, but EV3 motors CAN be used with the NXT. It is not possible to connect the new EV3 sensors to the NXT brick. However, you can use both Large and Medium EV3 motors with the NXT brick as if they are normal NXT motors.
What is the difference between turn and spin in an EV3 programming?
A Spin turn is when both wheels turn in opposite directions to spin the robot on the spot. The main difference between the two turns is that a pivot displaces the robot from its original position while a spin does not.
How do you use the NXT light sensor on an EV3?
If you want to use the NXT light sensor with the EV3 brick, you should use the color sensor block. If you put the color sensor block, set it to reflected light, set it to Port 1, delete the raw sensor value block and connect the two blocks, you will have a working program.
How do you get the ev3 robot to follow a line?
LINE FOLLOWING IN LOOP Wait for the Color Sensor to detect the color black. Start motors B and C (drive forward with a curve away from the line). Wait for the Color Sensor to detect the color white. Repeat steps 2 to 5 forever.
Do EV3 sensors work with NXT?
How does line following work in NXT-G robot?
Line following works by using the Light Sensor to read the changes in reflected light level along the edge of a dark and light surface. Then the Switch Block directs the motors to vary the speeds depending on the Light Sensor Value. In a Basic Line Follow the Light Sensor reads the light value.
Can you make a line follower in NXT?
Although under good conditions you can make a simple line follower using the color sensor in “Color Sensor” mode (if it will read, say, black for the line and white for the floor), you are better off using the color sensor in “Light Sensor” mode, where you can get a numeric brightness value from the sensor, so both programs here use it this way.
How does a robot detect a black line?
When the robot turns, the sensor is almost static. That’s because the sensor is on the same line as the point of the turn. If we want to detect the black line, we should make a huge turn which is very difficult to achieve. But if we position the sensor on the place of the gyro sensor, the robot will detect the black line only with a slight turn.
How to program a robot to follow a line?
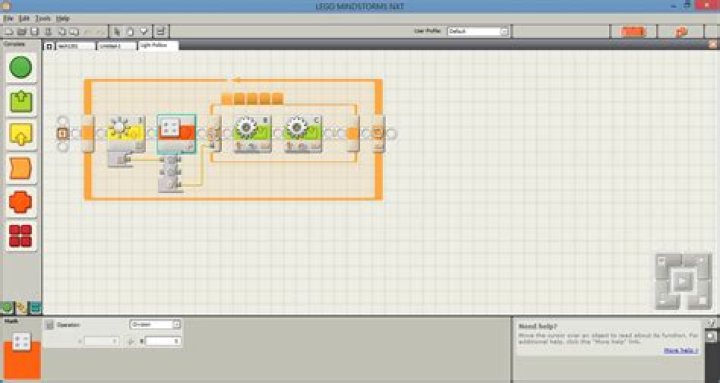
Write an NXT-G program that will have your robot follow a line using a simple Algorithm. Process: 1. Open the Mindstorms NXT-G software. (Double click the orange square icon.) 2. Name your program “LastnameBasicLineFollow” and Click “GO.” 3. Drag a Switch Block to the Programming Area. a. Set the Sensor to “Light Sensor” b. Set the Compare to < 40.
Line following works by using the Light Sensor to read the changes in reflected light level along the edge of a dark and light surface. Then the Switch Block directs the motors to vary the speeds depending on the Light Sensor Value. In a Basic Line Follow the Light Sensor reads the light value.
Write an NXT-G program that will have your robot follow a line using a simple Algorithm. Process: 1. Open the Mindstorms NXT-G software. (Double click the orange square icon.) 2. Name your program “LastnameBasicLineFollow” and Click “GO.” 3. Drag a Switch Block to the Programming Area. a. Set the Sensor to “Light Sensor” b. Set the Compare to < 40.
Can a robot follow a line with two color sensors?
This robot is an EV3 competition robot and you can find instructions for constructing it below the video. This robot has two color sensors but it can also have a color and a light sensor or two light sensors. This robot will follow the line. The basic idea of using two color sensors is to make the robot follow the line faster.
When the robot turns, the sensor is almost static. That’s because the sensor is on the same line as the point of the turn. If we want to detect the black line, we should make a huge turn which is very difficult to achieve. But if we position the sensor on the place of the gyro sensor, the robot will detect the black line only with a slight turn.
